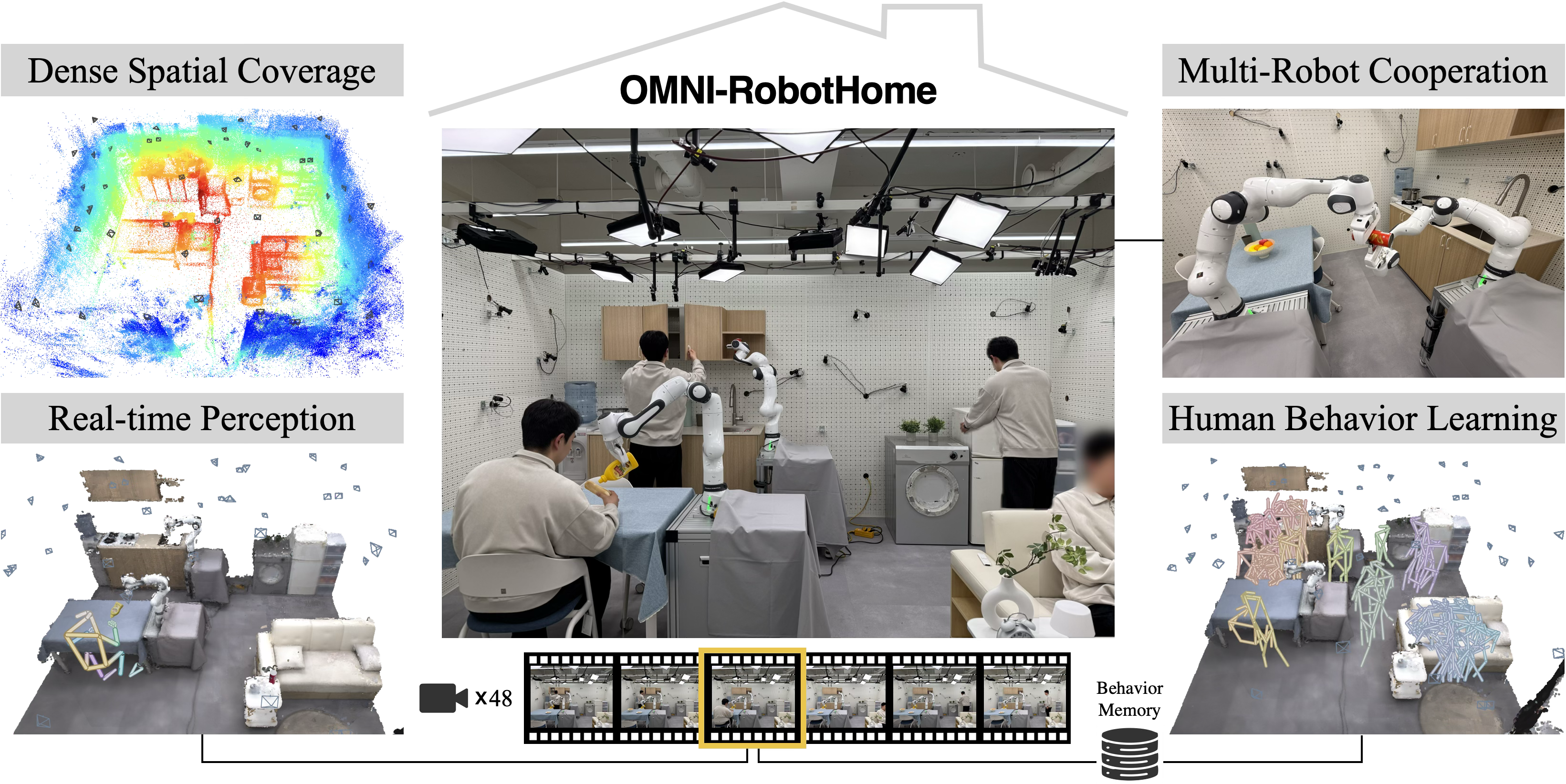
OmniRobotHome is the first room-scale residential platform that unifies wide-area real-time 3D human and object perception with coordinated multi-robot actuation in a shared world frame, enabling real-time multiadic human-robot collaboration in home environments.
@article{lee2026omnirobothome,title={OmniRobotHome: A Multi-Camera Platform for Real-Time Multiadic Human-Robot Interaction},author={Lee, Junyoung and Han, Sookwan and Kim, Jeonghwan and Lee, Inhee and Choi, Mingi and Kim, Jisoo and Woo, Wonjung and Joo, Hanbyul},journal={arXiv preprint arXiv:2604.28197},year={2026},}
Vanast: Virtual Try-On with Human Image Animation via Synthetic Triplet Supervision
Given a human image and one or more garment images, our method generates virtual try-on with human image animation conditioned on a pose video while preserving identity.
@inproceedings{cha2026vanast,title={Vanast: Virtual Try-On with Human Image Animation via Synthetic Triplet Supervision},author={Cha, Hyunsoo and Woo, Wonjung and Kim, Byungjun and Joo, Hanbyul},booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},year={2026},}